When automating almost any moderately complex mechanical task, the actuators and drive electronics can get expensive quickly. Rather than using an actuator for every motion, mechanical multiplexing might be an option. [James Bruton] has considered using it in some of his many robotics projects, so he built a prioritizing mechanical multiplexer to demonstrate the concept.
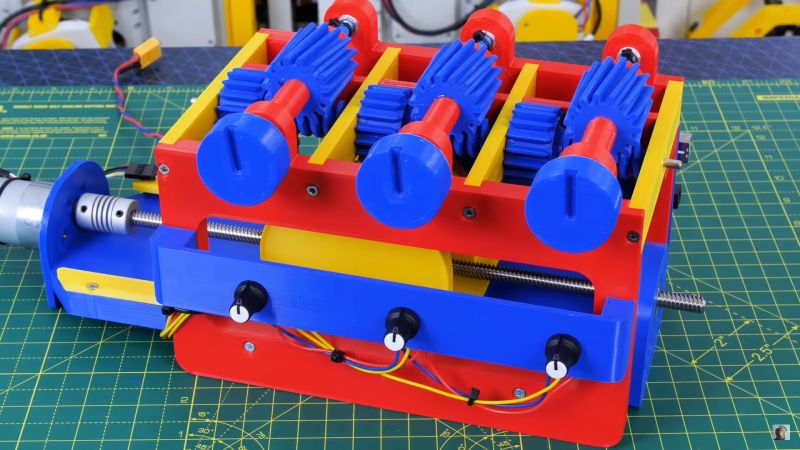
The basic idea is to have a single actuator and dynamically switch between different outputs. For his demonstration, [James] used a motor mounted on a moving platform actuated by a lead screw that can engage a number of different output gears. Each output turns a dial, and the goal is to match the position of the dial to the position of a potentiometer. The “prioritizing” part comes in where a number of outputs need to be adjusted, and the system must choose which to do first. This quickly turns into a task scheduling problem, since there are a number of factors that can be used to determine the priority. See the video after the break to see different algorithms in action.
Instead of moving the actuator, all the outputs can connect to a single main shaft via clutches as required. Possible use cases for mechanical multiplexers include dispensing machines and production line automation. Apparently, the Armatron robotic arm sold by Radioshack in the ’80s used a similar system, controlling all its functions with a single motor.
[James] knows or two about robotics, having built many of them over the last few years. Just take a look at OpenDog and his Start Wars robots.













0 Commentaires