In this USB-C series, we’ve covered quite a bit of USB-C – things that are well known, things that should be better known, and a couple things that just appeared online for the first time. We’ve covered almost everything in some depth except USB Power Delivery. I’ve described the process a bit in the “Power” article, but that was mostly about how to use PD by simply buying the right solution. However, that’s not enough for a hacker. Let’s see if we can make our own PD trigger board.
PD Trigger Board In 100 Lines Of Python
We’ll start with no pre-existing software stack – we’ll take a PD PHY (physical layer interface) chip, connect it over I2C, toggle its registers ourselves, and do our own packet crafting. I will use MicroPython, because I find it works best for educational purposes; plus, I genuinely like writing Python for hardware tinkering purposes, and I hope you can appreciate the benefits as well.
Our target for today? Getting 9 V voltage out of a USB-C PSU, short and sweet; basically, what every single trigger board out there is built to do. After we reach this target, you’ll be able to create your own trigger boards – but way cooler, customizable, with price likely comparable to a trigger board chip; plus, in Python, no less! Oh, and it will take us under a hundred lines of Python code to get there.
Minimum Hardware Requirements
If you want to follow along, you’ll want the FUSB302 chip, and some kind of MicroPython board. I’m using a RP2040+FUSB302B combination on a devboard of my own design, but an ESP8266 would do just as well. FUSB302B is the new and seemingly functionally identical option – not sure what the differences are, and I’m pretty sure they won’t matter to us.
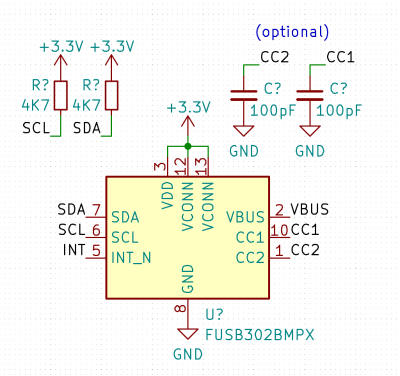 Of course, the FUSB302’s CC pins have to be connected to a USB-C receptacle; VCONN doesn’t matter to us here but you can short it to 3.3 V input. However, I do expect you to have a USB-C cable and a PSU with a USB-C socket, too – or a captive cable PSU, the captive/socketed part doesn’t matter much. And make sure your PSU is actually capable of voltages over 5 V – if it doesn’t state any, then it might not speak digital PD at all, only relying on analog signalling. 100 pF – 470 pF capacitors from CC to ground are desired, but by no means required. Wire up your 3.3 V, attach SDA and SCL (INT won’t hurt but isn’t needed for now), make sure I2C pullups are there, and let’s go!
Of course, the FUSB302’s CC pins have to be connected to a USB-C receptacle; VCONN doesn’t matter to us here but you can short it to 3.3 V input. However, I do expect you to have a USB-C cable and a PSU with a USB-C socket, too – or a captive cable PSU, the captive/socketed part doesn’t matter much. And make sure your PSU is actually capable of voltages over 5 V – if it doesn’t state any, then it might not speak digital PD at all, only relying on analog signalling. 100 pF – 470 pF capacitors from CC to ground are desired, but by no means required. Wire up your 3.3 V, attach SDA and SCL (INT won’t hurt but isn’t needed for now), make sure I2C pullups are there, and let’s go!
Niceties? It’d be nice if you could attach an LED to VBUS; having a 1 kΩ resistor in series ought to be enough for even 20 V on VBUS. I imagine some LEDs might get unhappy at 17 mA, but most should survive just fine; if they don’t, replace the LED and double the resistor. This will be useful during debugging later on! You don’t have to connect the USB-C port’s VBUS to the FUSB’s VBUS, though, it might help later on if building a more proper device is your aim. Absolutely do make VBUS accessible so that you can probe it with a multimeter and check whether your code has run successfully!
Software Setup
For a start, download the FUSB302 datasheet, as well as the USB PD specification, version 3.0 – we will refer to them both. Having both of them open while playing with PD is highly advised, in fact! That said, for this installment, we will only need the FUSB302 datasheet.
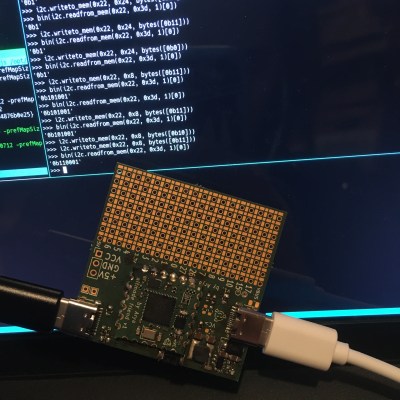 Get MicroPython onto your board, and initialize the I2C bus – here’s example code for RP2040, ESP8266 or ESP32. I highly recommend that you test the configuration and connections out in the MicroPython REPL first, through a serial terminal. Does an address like
Get MicroPython onto your board, and initialize the I2C bus – here’s example code for RP2040, ESP8266 or ESP32. I highly recommend that you test the configuration and connections out in the MicroPython REPL first, through a serial terminal. Does an address like 0x22 appear when you do i2c.scan()? Then you’ve wired everything up correctly! Does it not appear, or does the initialization fail? Make sure that your pins are defined properly, and you have pullups on I2C pins.
When an I2C device appears, you can play around. Try and read the 0x01 version and revision register. In general, consult the FUSB302 register map – it starts at datasheet page 18, and you’ll be jumping around these pages for a bit as you play! Reminder on how to read and write registers of an I2C device in MicroPython:
# Writing 0xAA and 0x55 to address 0x22, register 0x3e i2c.writeto_mem(0x22, 0x3e, bytes([0xAA, 0x55])) # Reading one byte from address 0x22, register 0x43 data = i2c.readfrom_mem(0x22, 0x43, l) # type of 'data' will be 'bytes', convert as needed, or just print it
Ready to proceed? Let’s switch away from REPL at this point – instead, I suggest you put code into a main.py document, transfer it to the board, then run it whenever you need to test it. My workflow for this mode is running a tmux session split into separate tabs for a terminal-based code editor and for a serial terminal/code upload shell – for code upload, I use ampy. If you’re looking for something GUI-based, I’ve had friends successfully use uPyCraft.
If you’re following this tutorial from CircuitPython, first, that’s admirable and I hope it’s easy enough for you to adapt the examples, and second, you have an advantage – it will be easier for you to upload your code, since CircuitPython supports storage device mode on things like the RP2040. However, there’s a disadvantage too – you’ll have to put more effort into debugging, since CircuitPython doesn’t let you introspect your code in REPL after it crashes – at least, it didn’t let me do it last time I tried, and that seemed to be a fundamental limitation.
Setting The Chip Up
First, we need to set a few registers in the FUSB302. These settings assume that a USB-C cable is plugged in; at least, most of them operate under such an assumption. I could set you up with a more sophisticated setup, but that’s not what this article is for – today, we’re getting a higher voltage out of a PSU we have connected, and we don’t need much for that.
First, a good practice is to reset the FUSB302 – who knows if your MCU has just been rebooted. Write 0x01 to 0x0c (RESET) register for that. 0x02 will reset the PD logic – we’ll need that later. Then, we need to get the chip’s different parts out of sleep – writing 0x0f to 0x0b (POWER) register will do. Write 0x00 to 0x06 (CONTROL0) to unmask all interrupts, then 0x07 to CONTROL3 to enable packet retries. Now, we’re ready to determine the CC polarity!
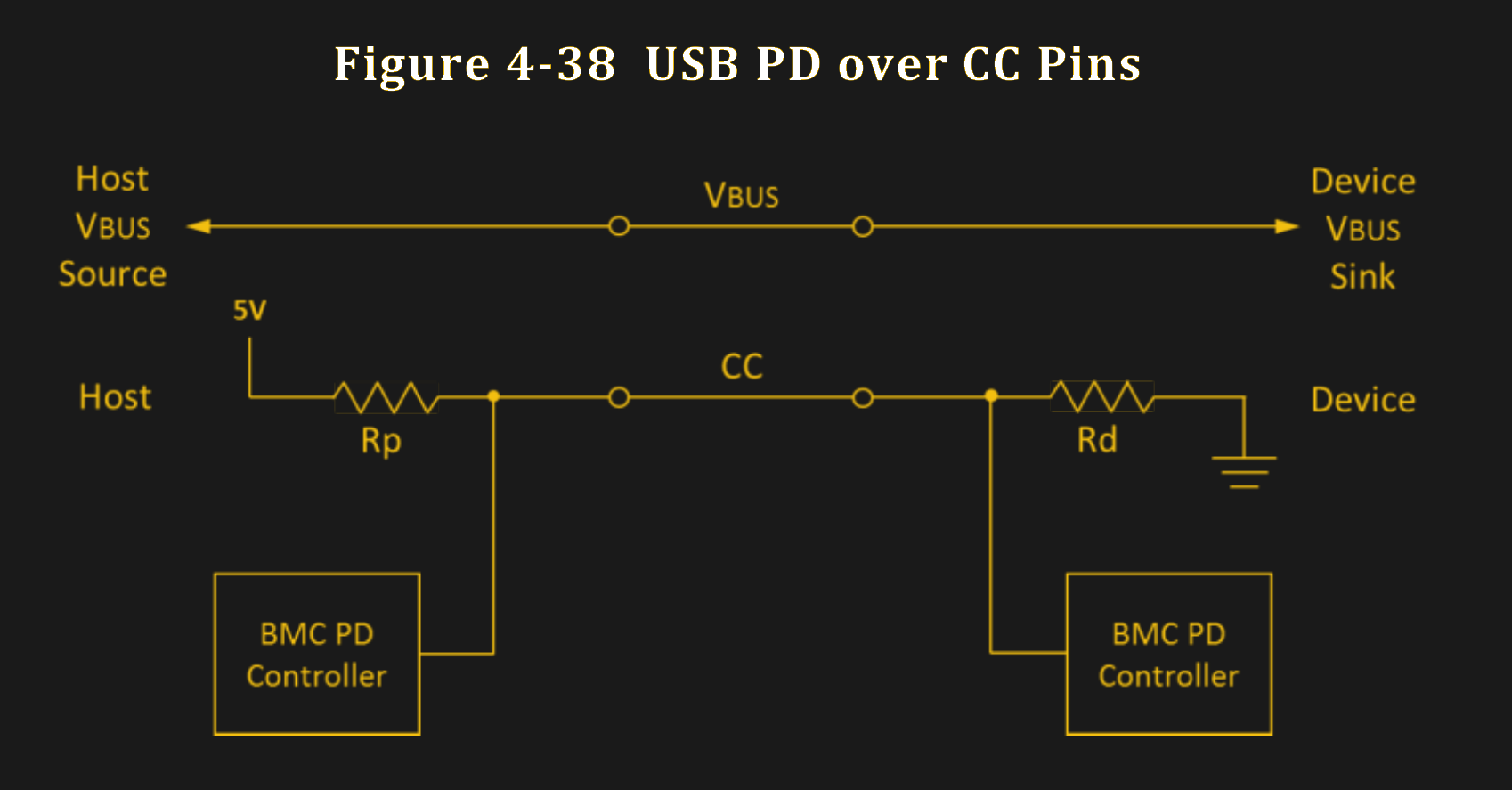
The FUSB302 has pulldown resistors implemented by default, and while we could detach them, they do help, as we’re working with a PSU right now – which has a pullup on the CC line. The PD communication only happens on one of the CC pins, and by measuring which one of them has a source pullup attached, we can determine which pin is connected to the PSU. The specific way to do this, I’ve borrowed from the Pinecil’s FUSB302 initialization code, through snooping upon it a logic analyzer. However, I’ve seen this exact method done in other FUSB302-aimed libraries as well.
This could very well be a cargo cult measure, given that one could theoretically use the port role automatic toggle (see CONTROL2) feature of the FUSB302 – I didn’t get that one to work well for me, however. Until now – the Pinecil implementation that I learned from, happens to be sink-only, and uses a manual measurement method. It’s straightforward – connect to CC1, measure the voltage, connect to CC2, measure the voltage, then compare. The FUSB302 has two convenient bits that convert CC pullup voltage to USB current levels allowed, and we can just compare those two bits between two reads.
First, write 0x07 (0b111) to 0x02 (SWITCH0), connecting the internal ADC to CC1 – then, read 0x40 (STATUS0), and get the bits 1-0 from that; those bits represent current levels, and the non-connected pin will indicate zero. Then, switch the ADC to CC2 by writing 0x0b (0b1011) to SWITCH0, and read STATUS0 again. If the CC1 value is larger than CC2, then the PSU is connected to CC1, and vice-versa. If both the CC1 and CC2 reading are at zero, then there’s no PSU detected – that’s where you add a “nothing detected” special case to your code, and then perhaps wait for a PSU to be attached. Alternatively, as a homework assignment, you can try and get the toggle feature working!
Starting The Transmitter Has Consequences
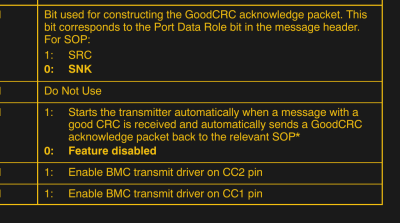
We now know the CC pin to operate on – let’s make use of that. Say, our pin is CC1. We enable both the receive and transmitter on it, as well as automatic GoodCRC responses. Write 0x25 (0b100101) to 0x03 (SWITCH1) register – bits 0-1 will change depending on which CC pin you want the transmitter to connect to, bit 2 enables automatic GoodCRC responses, and bits 5-6 say that we’re going to talk PD revision 2.0. We’re actually going to be talking PD 3.0, but the FUSB302 datasheet hasn’t been updated to say that it’s outright supported, even though it seems to be fully functionally compatible as far as I’ve been told. Then, write 0x07 to the SWITCH0 register – connecting the measure block to the CC1 pin, just like when we were measuring it.
The GoodCRC part is a “point of no return” of sorts. The GoodCRC message transmission means that, whether you’re talking to a PSU or a device, the other side essentially receives ‘message acknowledged’ responses to whatever they sent. In short, sending GoodCRC responses is a sign of intelligent life sent to the device on the other side of the USB-C cable. Some USB-C messages, however, also require an intelligent response within a certain timeframe after they’ve been received – if you send a GoodCRC response automatically, but then don’t send a response expected, that might incur a ‘something went wrong’ response on the other end.
 For instance, a USB-C power supply will automatically send out a list of its capabilities – power profiles, the options we know as “5 V @ 3 A”, “12 V @ 2.25 A” and so on. If you acknowledge those with your automatic GoodCRC response, you have 500 ms to reply with the power profile you want to use – even if you plan to stay at 5 V. The USB-C specification requires a PSU to disable and enable VBUS if it doesn’t receive a profile response – most PSUs obey this. If you send GoodCRC to the advertisement but don’t reply with a preferred profile, and your device is powered from USB-C VBUS, the PSU will cause it to go into an infinite power looping. The solution is simple – reply as soon as you get an advertisement; if you want to ask for a different profile later, you can always do so!
For instance, a USB-C power supply will automatically send out a list of its capabilities – power profiles, the options we know as “5 V @ 3 A”, “12 V @ 2.25 A” and so on. If you acknowledge those with your automatic GoodCRC response, you have 500 ms to reply with the power profile you want to use – even if you plan to stay at 5 V. The USB-C specification requires a PSU to disable and enable VBUS if it doesn’t receive a profile response – most PSUs obey this. If you send GoodCRC to the advertisement but don’t reply with a preferred profile, and your device is powered from USB-C VBUS, the PSU will cause it to go into an infinite power looping. The solution is simple – reply as soon as you get an advertisement; if you want to ask for a different profile later, you can always do so!
Nevertheless, we should do a bit of cleanup before we start receiving messages. Write 0x40 into 0x06 (CTRL0) to flush the TX buffer, 0x04 into 0x07 to flush the RX buffer, and 0x02 into 0x0c (RESET) to reset the FUSB’s internal PD logic.
Now we’re all set – the messages will be coming into the FUSB302’s receive buffer, and we’ll be able to read them.
Getting Messages
A PD PSU will automatically send out a message with its capabilities, and it will try to do that a few times after power-up – until the moment that a message is acknowledged with our GoodCRC. As your board is presumably not powered from the same USB-C port, you will be able to receive the message from inside the REPL and poke at it – however, do remember that the PSU will timeout unless you’re able to request a profile on time, and you won’t be able to do that interactively; in other words, you need to craft a response automatically. Nevertheless, we will be able to do just that fairly easily!
How do you check whether there’s something in the receive buffer? Read the 0x41 (STATUS1) register and check the bits 5-4: bit 5 will be set to zero when the receive buffer contains something. Then, you can read bytes out of the buffer – with a block read, from the 0x43 address. The buffer might contain multiple messages at once, however, in a simple USB-C PD power supply scenario, you can expect there to be one message.
You don’t have to carefully read a single message’s worth of bytes for now – for ‘checking that things work’ purposes, you can just read the entire buffer, which is 80 bytes long. Let’s do just that!
>>> b = i2c.readfrom_mem(0x22, 0x43, 80) >>> b b'\xe0\xa1a,\x91\x01\x08,\xd1\x02\x00\x13\xc1\x03\x00\xdc\xb0\x04\x00\xa5@\x06\x00<!\xdc\xc0H\xc6\xe7\xc6\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00'
We Got Contact!
We received our first message! And we only needed to follow a relatively simple initialization sequence – this is not all that much harder than playing with a HD44780 LCD; and you could surely stuff this code into an ATTiny, even. I’d like to thank [Ralim] and [Clara Hobbs] for laying the groundwork; the commands I’m describing, are theirs to have figured out – I couldn’t figure out the full sequence by myself, so, a lot of the “which commands are actually needed for it to work” was taken from their stacks.
In the next article, we will parse this message and craft a proper reply to it! I have to apologize for leaving you on a cliffhanger, but properly walking you through parsing messages will take a bit of time. However, you don’t need to do any FUSB302 configuration anymore – you are already prepared to reply with a PD message, as soon as you can craft a suitable reply. Do you feel impatient? Want to do it yourself, as homework? Here’s my code for parsing such messages, here’s IronOS code responsible for the same, and here’s my pretty-printed I2C communications capture of a Pinecil negotiating a higher voltage profile. Otherwise, we’ll finish this next week!



![[Thomas Sanladerer] Gets New Threads](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_tFrsGrcpuTxyDbVASLkW6mTsyBZR_giTQBfVqoqKmDC9MQL1lpErq3Th8_ZDOI29TFu0OCJ1Tnnx1Pwsz0zJHlcMAUvSCTUN2OSYZR2bMFvlFIHiyzasxsSGXQ5h4nsIaTJ1U=w680)









0 Commentaires