
With high-altitude ballooning, you are at the mercy of the winds, which can move your payload hundreds of kilometers and deposit it in some inaccessible spot. To solve this [Yohan Hadji] created R2Home, an autonomous parachute-based recovery system that can fly a payload to any specified landing site within its gliding range.
We first covered R2Home at the start of 2021, when he was still in the early experimental phases, but the project has matured massively since then. It just completed its longest and highest test flight. Descending autonomously from a release altitude of 3500 m, with an additional radiosonde payload, it landed within 5 m of the launch point.
R2Home can fly using a variety of steerable canopies, even a DIY ram-air parachute, as demonstrated in an earlier version. [Yohan] is currently using a high-performance wing for RC paragliders.
A lot of effort went into developing a reliable parachute deployment system. The main canopy is packed carefully in a custom “Dbag”, which is attached to a drogue chute to stabilize the system during free-fall and deploy the main canopy at a preset altitude. This is done with a servo operated release mechanism, while steering is handled by a pair of modified winch servos intended for RC sailboats.
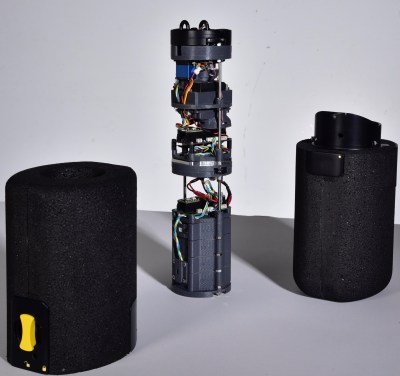
All the electronics are mounted on a stack of circular 3D printed brackets which fit in a tubular housing, bolted together with threaded rods. With the help of a design student [Yohan] also upgraded the simple tube housing to a lockable, foam-insulated design to help it handle temperatures at high altitudes.
The flight main flight computer is a Teensy 4.1 plugged into a custom PCB to connect all the navigation, communication, and flight systems. The custom Arduino-based autopilot takes inputs from a GPS receiver, and pilots the system to the desired drop zone, which it circles until touchdown.
The entire project is extremely well documented, and all the design files and code are open source and available on Github.













0 Commentaires